-
1 supply feeder
-
2 feeder
устройство подачи [питания]; фидер, точка подвода питания; подаватель -
3 PoE injector
инжектор PoE
Устройство подачи питания в кабель по технологии PoE
[Интент]Технология PoE не оказывает влияния на качество передачи данных. Для ее реализации используются свойства физического уровня Ethernet:
C использованием высокочастотных трансформаторов на обоих концах линии с центральным отводом от обмоток постоянное напряжение питания подается на центральные отводы вторичных обмоток этих трансформаторов, и так же с центральных отводов снимается на приемной стороне. Использование центральных отводов сигнальных трансформаторов позволяет без взаимного влияния передавать питание по сигнальным парам, то есть передавать по одним и тем же проводникам и высокочастотные данные, и постоянное напряжение питания.
Использование свободных пар для подачи питания. Современные кабельные сети Ethernet, соответствующие стандарту 100BASE-TX, состоят из четырех пар, две из которых не задействованы.
Питающие устройства ( инжекторы; англ. power sourcing equipment, сокр. PSE) отличаются по способу подключения питания, при этом питаемые устройства (сплиттеры; англ. powered device, сокр. PD) являются универсальными. Питаемые устройства должны проектироваться с возможностью приема питания в любом варианте, в том числе и при изменении полярности (например, когда используется перекрестный кабель).
Важным является то обстоятельство, что питающее устройство подает питание в кабель только в том случае, если подключаемое устройство является устройством питаемого типа. Таким образом, оборудование, не поддерживающее технологию PoE и случайно подключенное к питающему устройству, не будет выведено из строя[5]. Процедура подачи и отключения питания на кабель состоит из нескольких этапов.
Определение подключения
Этап определения подключения служит для определения, является ли подключенное на противоположном конце кабеля устройство питаемым (PD). На этом этапе питающее устройство (PSE) подает на кабель напряжение от 2,8 до 10 B и определяет параметры входного сопротивления подключаемого устройства. Для питаемого устройства это сопротивление составляет от 19 до 26,5 кОм с параллельно подключенным конденсатором ёмкостью от 0 до 150 нФ[6]. Только после проверки соответствия параметров входного сопротивления для питаемого устройства, питающее устройство переходит к следующему этапу, в противном случае питающее устройство повторно, через промежуток времени не менее 2 мс, пытается определить подключение.
Классификация
После этапа определения подключения, питающее устройство может дополнительно выполнять этап классификации, определяя диапазон мощностей, потребляемых питаемым устройством, чтобы затем контролировать эту мощность. Каждому питаемому устройству в зависимости от заявленной потребляемой мощности будет присвоен класс от 0 до 4. Минимальный диапазон мощностей имеет класс 0. Класс 4 зарезервирован стандартом для дальнейшего развития. Питающее устройство может снять напряжение с кабеля, если питаемое устройство стало потреблять мощность больше объявленной во время классификации. Классификация выполняется путём введения в кабель питающим устройством напряжения от 14,5 до 20,5 В и измерения тока в линии.
Подача полного напряжения
После прохождения этапов определения и классификации питающее устройство подает в кабель напряжение 48 В с фронтом нарастания не быстрее 400 мс. После подачи полного напряжения на питаемое устройство, питающее устройство осуществляет контроль его работы двумя способами:
если питаемое устройство в течение 400 мс будет потреблять ток меньше 5 мА, то питающее устройство снимает питание с кабеля;
питающее устройство подает в кабель напряжение 1,9—5,0 В с частотой 500 Гц и вычисляет входное сопротивление; если это сопротивление будет больше 1980 кОм в течение 400 мс, питающее устройство снимает питание с кабеля.
Кроме того, питающее устройство непрерывно следит за током перегрузки. Если питаемое устройство будет потреблять ток более 400 мА в течение 75 мс, питающее устройство снимет питание с кабеля.
Отключение
Когда питающее устройство определяет, что питаемое устройство отключено от кабеля или произошла перегрузка потребляемого тока питаемым устройством, происходит снятие напряжение с кабеля за время не менее 500 мс.
[ http://ru.wikipedia.org/wiki/Power_over_Ethernet]Тематики
EN
инжектор PoE
Устройство подачи питания в кабель по технологии PoE
[Интент]Технология PoE не оказывает влияния на качество передачи данных. Для ее реализации используются свойства физического уровня Ethernet:
C использованием высокочастотных трансформаторов на обоих концах линии с центральным отводом от обмоток постоянное напряжение питания подается на центральные отводы вторичных обмоток этих трансформаторов, и так же с центральных отводов снимается на приемной стороне. Использование центральных отводов сигнальных трансформаторов позволяет без взаимного влияния передавать питание по сигнальным парам, то есть передавать по одним и тем же проводникам и высокочастотные данные, и постоянное напряжение питания.
Использование свободных пар для подачи питания. Современные кабельные сети Ethernet, соответствующие стандарту 100BASE-TX, состоят из четырех пар, две из которых не задействованы.
Питающие устройства ( инжекторы; англ. power sourcing equipment, сокр. PSE) отличаются по способу подключения питания, при этом питаемые устройства (сплиттеры; англ. powered device, сокр. PD) являются универсальными. Питаемые устройства должны проектироваться с возможностью приема питания в любом варианте, в том числе и при изменении полярности (например, когда используется перекрестный кабель).
Важным является то обстоятельство, что питающее устройство подает питание в кабель только в том случае, если подключаемое устройство является устройством питаемого типа. Таким образом, оборудование, не поддерживающее технологию PoE и случайно подключенное к питающему устройству, не будет выведено из строя[5]. Процедура подачи и отключения питания на кабель состоит из нескольких этапов.
Определение подключения
Этап определения подключения служит для определения, является ли подключенное на противоположном конце кабеля устройство питаемым (PD). На этом этапе питающее устройство (PSE) подает на кабель напряжение от 2,8 до 10 B и определяет параметры входного сопротивления подключаемого устройства. Для питаемого устройства это сопротивление составляет от 19 до 26,5 кОм с параллельно подключенным конденсатором ёмкостью от 0 до 150 нФ[6]. Только после проверки соответствия параметров входного сопротивления для питаемого устройства, питающее устройство переходит к следующему этапу, в противном случае питающее устройство повторно, через промежуток времени не менее 2 мс, пытается определить подключение.
Классификация
После этапа определения подключения, питающее устройство может дополнительно выполнять этап классификации, определяя диапазон мощностей, потребляемых питаемым устройством, чтобы затем контролировать эту мощность. Каждому питаемому устройству в зависимости от заявленной потребляемой мощности будет присвоен класс от 0 до 4. Минимальный диапазон мощностей имеет класс 0. Класс 4 зарезервирован стандартом для дальнейшего развития. Питающее устройство может снять напряжение с кабеля, если питаемое устройство стало потреблять мощность больше объявленной во время классификации. Классификация выполняется путём введения в кабель питающим устройством напряжения от 14,5 до 20,5 В и измерения тока в линии.
Подача полного напряжения
После прохождения этапов определения и классификации питающее устройство подает в кабель напряжение 48 В с фронтом нарастания не быстрее 400 мс. После подачи полного напряжения на питаемое устройство, питающее устройство осуществляет контроль его работы двумя способами:
если питаемое устройство в течение 400 мс будет потреблять ток меньше 5 мА, то питающее устройство снимает питание с кабеля;
питающее устройство подает в кабель напряжение 1,9—5,0 В с частотой 500 Гц и вычисляет входное сопротивление; если это сопротивление будет больше 1980 кОм в течение 400 мс, питающее устройство снимает питание с кабеля.
Кроме того, питающее устройство непрерывно следит за током перегрузки. Если питаемое устройство будет потреблять ток более 400 мА в течение 75 мс, питающее устройство снимет питание с кабеля.
Отключение
Когда питающее устройство определяет, что питаемое устройство отключено от кабеля или произошла перегрузка потребляемого тока питаемым устройством, происходит снятие напряжение с кабеля за время не менее 500 мс.
[ http://ru.wikipedia.org/wiki/Power_over_Ethernet]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > PoE injector
-
4 feeder
1. питатель, подающий механизм; самонаклад2. накладчикautomatic feeder — самонаклад, питатель, подающий механизм
back separation feeder — самонаклад с отделением листа за заднюю кромку, самонаклад с задней пневматической головкой
3. самонаклад с зарядкой стапельного стола на ходу4. самонаклад для каскадной подачи листовforward suction feeder — самонаклад с отделением листа за переднюю кромку, самонаклад с передней пневматической головкой
front separation feeder — самонаклад с отделением листа за переднюю кромку, самонаклад с передней пневматической головкой
length feeder — самонаклад, подающий лист короткой стороной вперёд
feeder unit — подающее устройство, самонаклад
5. самонаклад для подачи листов бумаги, бумагопитающее устройствоfeeder station — подборочная станция, самонаклад
6. бумажно-каптальная секция7. самонаклад печатной машины8. накладчик на печатной машинеrear suction feeder — самонаклад с отделением листа за заднюю кромку, самонаклад с задней пневматической головкой
sheet feeder — листоподающее устройство, самонаклад для подачи листов
stack feeder — подающее устройство; устройство для подачи материала, устройство для подачи полуфабриката
9. пневматический самонаклад10. пневматические присосы самонаклада11. самонаклад для подачи верхнего листа12. самонаклад с отделением и подачей верхних листовsheet pick-up feeder — раскладчик — питатель листов
-
5 printer paper feeder
feeder unit — подающее устройство, самонаклад
English-Russian big polytechnic dictionary > printer paper feeder
-
6 wire feeder
-
7 collating document feeder
feeder switchboard — распределительный щит; щит питания
English-Russian big polytechnic dictionary > collating document feeder
-
8 PDM
- широтно-импульсная модуляция
- фазоразностная модуляция
- управление данными об изделии
- поверхностная акустическая волна
- модуляция по длительности импульса
- модуль распределения питания
модуль распределения питания
-
[Интент]
Рис. APC
Модуль для подачи питания на трехфазную нагрузку

Рис. APC
Модуль для подачи питания на однофазные нагрузкиПараллельные тексты EN-RU
Factory assembled and tested Power Distribution Modules include circuit breaker, power cord, power connection, and circuit monitoring.
Собранные и проверенные на заводе-изготовиетеле модули распределения питания включают в себя автоматический выключатель, кабель, кабельную розетку и средства контроля состояния линии питания.
A variety of breaker and connector options can be chosen to supply either three-phase or single-phase power to the load.
Широкий выбор автоматических выключателей и кабельных розеток позволяет легко подобрать нужный модуль для подачи питания на трехфазные и однофазные нагрузки.
When demand rises and expansion becomes necessary, simply plug in new Power Distribution Modules. The factory-assembled modules, which include circuit breaker, power cord, and power connection, can be installed in mere minutes. There are multiple power ratings and power cord lengths for low to high power, guaranteeing compatibility and quick, easy, and convenient installation.
[APC]Когда потребляемая мощность увеличивается и необходимо расширение системы бесперебойного питания, то достаточно просто вставить новые модули распределения питания. Собранные на заводе-изготовителе модули, состоящие из автоматического выключателя, кабеля и кабельной розетки, можно установить за несколько минут. Модули поставляются на различные номинальные токи и с кабелями различной длины, что позволяет легко подобрать нужный модуль, быстро и без особого труда его установить.
[Перевод Интент]
How to install the PDM
Note: Some Power Distribution Units have filler plates installed. When a PDM is to be installed, the filler plate must be removed from the busbar.
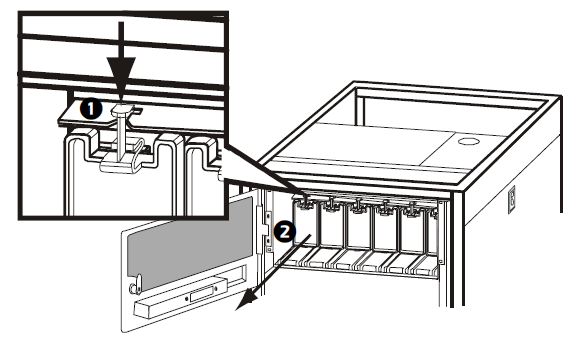
1 Press down on the clip.
2 Pull out the plate from the unit. (Do not throw away the filler plate. Keep it for potential later use).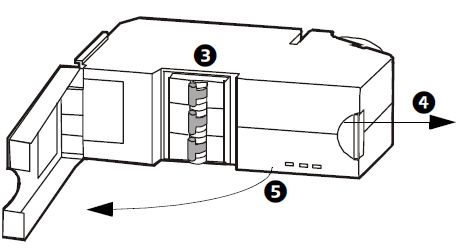
3 Verify that all the breakers are in the OFF position.
4 Press the red button to release the latch.
5 Pull open the latch.Vertical Rack Distribution Panel
Horizontal Rack Distribution Panel
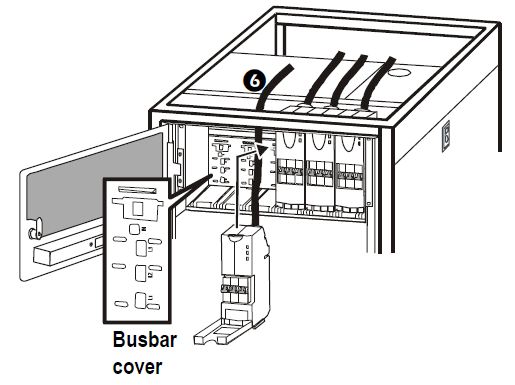
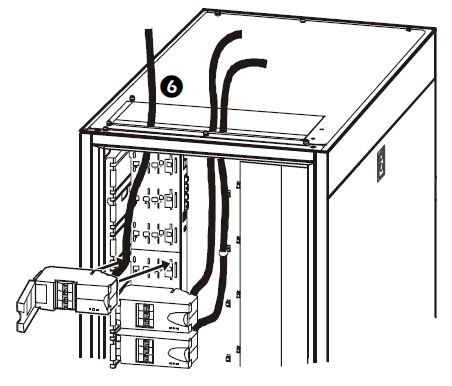
6 Feed the cable(s) up through the top opening in the enclosure and into the cable power troughs (if applicable) on top of enclosures.
How to install a PDM circuit breaker handle tie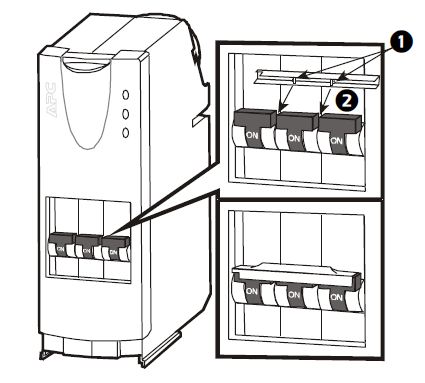
1 Locate the handle tie above the circuit breaker handles aligning the two tabs between the three handles.
2 Push the handle tie towards the circuit breaker handles until it snaps into position. Check to make sure that the handle tie is secure.
3 The handle tie can be removed by pulling it from the circuit breaker handles.Тематики
- НКУ (шкафы, пульты,...)
- источники и системы электропитания
EN
модуляция по длительности импульса
широтно-импульсная модуляция
ШИМ
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
управление данными об изделии
Системы PDM обобщают такие технологии, как:
EDM (engineering data management) - управление инженерными данными,
PIM (product information management) - управление информацией об изделии,
TDM (technical data management) - управление техническими данными,
TIM (technical information management) - управление технической информацией,
а также другие системы, которые используются для манипулирования информацией, всесторонне определяющей конкретное изделие. Короче говоря, любая информация, необходимая на том или ином этапе жизненного цикла изделия, может управляться системой PDM, которая предоставляет корректные данные всем пользователям и всем промышленным информационным системам по мере надобности. Наряду с данными, PDM управляет и проектом - процессом разработки изделия, контролируя собственно информацию об изделии - "продукте", о состоянии объектов данных, об утверждении вносимых изменений, осуществляя авторизацию и другие операции, которые влияют на данные об изделии и режимы доступа к ним каждого конкретного пользователя.
Таким образом, речь идет о полном, централизованном и постоянном автоматизированном контроле за всей совокупностью данных, описывающих как само изделие, так и процессы его конструирования, производства, эксплуатации и утилизации.
[ http://www.morepc.ru/dict/]Тематики
EN
фазоразностная модуляция
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
широтно-импульсная модуляция
ШИМ
Последовательный сигнал, информативным в котором является ширина импульса при постоянной частоте следования.
[ http://www.morepc.ru/dict/]
широтно-импульсная модуляция
-
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]Тематики
- электротехника, основные понятия
Синонимы
EN
06.04.13 поверхностная акустическая волна [ surface acoustic wave; SAW]: Электроакустический эффект, используемый в системах автоматической идентификации, когда микроволновые радиосигналы малой мощности с помощью пьезоэлектрического кристалла в радиочастотной метке преобразуются в ультразвуковые поверхностные акустические волны.
Примечание - Информация об уникальной идентификации содержится в фазово-временных вариациях отраженного радиочастотной меткой сигнала.
<2>4 Сокращения
ARQ
Автоматический запрос повтора [Automatic Repeat Request]
ASK
Амплитудная манипуляция [Amplitude Shift Keying]
BPSK
Бинарная фазовая манипуляция [Binary Phase Shift Keying]
CDMA
Множественный доступ с кодовым разделением каналов [Code Division Multiple Access]
CSMA
Множественный доступ с анализом состояния канала передачи данных [Carrier Sense Multiple Access]
CSMA/CD
Множественный доступ с анализом состояния канала передачи данных и обнаружением конфликтов [Carrier Sense Multiple Access with Collision Detection]
DBPSK
Дифференциальная бинарная фазовая манипуляция [Differential binary phase shift keying]
DSSS
Широкополосная модуляция с непосредственной передачей псевдослучайной последовательности [Direct sequence spread spectrum modulation]
EIRP (ЭИИМ)
Эквивалентная изотропно-излучаемая мощность [Equivalent Isotropically Radiated Power]
EMI
Электромагнитная помеха [ElectroMagnetic Interference]
ETR
Технический отчет ETSI [European Telecommunications Report]
ETS
Телекоммуникационный стандарт ETSI [European Telecommunications Standard]
ETSI
Европейский институт по стандартизации в области телекоммуникаций [European Telecommunications Standards Institute]
FHSS
Широкополосная модуляция с дискретной перестройкой несущей частоты [Frequency Hopping Spread Spectrum]
FSK
Частотная манипуляция [Frequency Shift Keying]
GHz (ГГц)
Гигагерц [Gigahertz]
GMSK
Минимальная гауссовская манипуляция [Gaussian Minimum Shift Keying]
kHz (кГц)
Килогерц [Kilohertz]
MSK
Минимальнофазовая частотная манипуляция [Minimum shift keying]
MHz (МГц)
Мегагерц [Megahertz]
OBE
Навесное оборудование [On-Board Equipment]
PDM
Модуляция импульса по длительности, широтно-импульсная модуляция [Pulse Duration Modulation]
PM
Фазовая модуляция [Phase modulation]
PPM (ФИМ)
Фазоимпульсная модуляция [Modulation (pulse position)]
PSK
Фазовая манипуляция [Phase Shift Keying]
PWM
Широтно-импульсная модуляция [Pulse Width Modulation]
RF/DC
Обмен данными системы радиочастотной идентификации [Radio frequency data communication]
RFI
Радиопомеха [Radio frequency interference]
RSSI
Индикатор уровня принимаемого сигнала [Receiving Signal Strength Indicator]
S/N
Отношение сигнала к шуму [Signal/noise ratio]
SAW
Поверхностная акустическая волна [Surface Acoustic Wave]
SIN AD
Отношение сигнала к шуму и искажению [Signal to Noise & Distortion]
SRD
Устройство малого радиуса действия [Short Range Device]
TBR
Технические основы регулирования [Technical Basis for Regulation]
TDD
Дуплексная связь с временным разделением каналов [Time Division Duplexing]
TDM
Временное разделение каналов [Time Division Multiplexing]
<2>Библиография
[1]
МЭК 60050-713
(IEC 60050-713)
Международный электротехнический словарь. Часть 713. Радиосвязь: приемники, передатчики, сети и их режим работы
( International Electrotechnical Vocabulary - Part 713: Radiocommunications: transmitters, receivers, networks and operation)
[2]
МЭК 60050-705
(IEC 60050-705)
Международный электротехнический словарь. Глава 705: Распространение радиоволн ( International Electrotechnical Vocabulary - Chapter 705: Radio wave propagation)
[3]
МЭК 60050-702
(IEC 60050-702)
Международный электротехнический словарь. Глава 702: Колебания, сигналы и соответствующие устройства
( International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices)
[4]
МЭК 60050-121
(IEC 60050-121)
Международный электротехнический словарь. Глава 121: Электромагнетизм ( International Electrotechnical Vocabulary - Part 121: Electromagnetism)
[5]
МЭК 60050-712
(IEC 60050-712)
Международный электротехнический словарь. Глава 712: Антенны ( International Electrotechnical Vocabulary - Chapter 712: Antennas)
[6]
МЭК 60050-221
(IEC 60050-221)
Международный электротехнический словарь. Глава 221: Магнитные материалы и компоненты
( International Electrotechnical Vocabulary - Chapter 221: Magnetic materials and components)
[7]
ИСО/МЭК 2382-9:1995
(ISO/IEC2382-9:1995)
Информационная технология. Словарь. Часть 9. Обмен данными ( Information technology - Vocabulary - Part 9: Data communication)
[8]
МЭК 60050-725
(IEC 60050-725)
Международный электротехнический словарь. Глава 725: Космическая радиосвязь ( International Electrotechnical Vocabulary - Chapter 725: Space radiocommunications)
[9]
МЭК 60050-714
(IEC 60050-714)
Международный электротехнический словарь. Глава 714: Коммутация и сигнализация в электросвязи
( International Electrotechnical Vocabulary - Chapter 714: Switching and signalling in telecommunications)
[10]
МЭК 60050-704
(IEC 60050-704)
Международный Электротехнический словарь. Глава 704. Техника передачи ( International Electrotechnical Vocabulary - Chapter 704: Transmission)
[11]
МЭК 60050-161
(IEC 60050-161)
Международный электротехнический словарь. Глава 161: Электромагнитная совместимость ( International Electrotechnical Vocabulary. Chapter 161: Electromagnetic compatibility)
[12]
ИСО/МЭК 8824-1
(ISO/IEC 8824-1)
Информационные технологии. Абстрактная синтаксическая нотация версии один
(АСН.1). Часть 1. Спецификация основной нотации
(Information technology - Abstract Syntax Notation One (ASN.1): Specification of basic notation)1)
[13]
ИСО/МЭК 9834-1
(ISO/IEC 9834-1)
Информационные технологии. Взаимосвязь открытых систем. Процедуры действий уполномоченных по регистрации ВОС. Часть 1. Общие процедуры и верхние дуги дерева идентификатора объекта АСН.1
( Information technology - Open Systems Interconnection - Procedures for the operation of OSI Registration Authorities: General procedures and top arcs of the ASN. 1 Object Identifier tree)
[14]
ИСО/МЭК 15962]
(ISO/IEC 15962)
Информационные технологии. Радиочастотная идентификация (RFID) для управления предметами. Протокол данных: правила кодирования данных и функции логической памяти
( Information technology - Radio frequency identification ( RFID) for item management - Data protocol: data encoding rules and logical memory functions)
[15]
ИСО/МЭК 19762-1
(ISO/IEC 19762-1)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АIDC ( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 1: General terms relating to AIDC)
[16]
ИСО/МЭК 19762-2
(ISO/IEC 19762-2)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 2. Оптические носители данных (ОНД)
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 2: Optically readable media ( ORM))
[17]
ИСО/МЭК 19762-3
(ISO/IEC 19762-3)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ)
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 3: Radio frequency identification ( RFID))
[18]
ИСО/МЭК 19762-5
(ISO/IEC 19762-5)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 5. Системы определения места нахождения
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 5: Locating systems)
[19]
ИСО/МЭК 18000-6
(ISO/IEC 18000-6)
Информационные технологии. Радиочастотная идентификация для управления предметами. Часть 6. Параметры радиоинтерфейса для диапазона частот 860 - 960 МГц ( Information technology - Radio frequency identification for item management - Part 6: Parameters for air interface communications at 860 MHz to 960 MHz)
_____________
1)В оригинале ИСО/МЭК 19762-4 стандарты [12] - [19] включены в раздел «Библиография», однако следует учитывать, что в основном тексте стандарта ссылок на них нет.
<2>
Источник: ГОСТ Р ИСО/МЭК 19762-4-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи оригинал документа
Англо-русский словарь нормативно-технической терминологии > PDM
-
9 feeder
['fiːdə]1) Общая лексика: актёр на вторые роли, ветка, вспомогательная воздушная линия, вспомогательная воздушная, автобусная и т. п. линия, детский нагрудник, детский рожок, дополнительная автобусная линия, едок, иждивенец, источник пополнения, канал, кормушка, питатель, подача, поставщик, приток (реки), фидер2) Компьютерная техника: подающий лоток, система подачи3) Геология: ключ воды, питающий канал сети, побочная жила, подводящий или питательный канал (лакколита), подводящий канал, приток реки, сопровождающая жила, сопровождающая или побочная жила, питательный канал (лакколита), подводящий канал (лакколита)4) Биология: фидер (питающий подслой в культуре клеток), подслой (питающий подслой в культуре клеток)6) Американизм: воспитатель, тренер7) Военный термин: подъездной путь, механизм подачи боеприпасов8) Техника: антенный фидер, дозатор, загрузочное устройство, загрузчик, линия передачи, местная авиалиния, ороситель, питательное устройство, питающая линия, питающий кабель, податчик, подающий механизм, привод подачи, приточный канал, рабочий бак, расходный бак, транспортёр, устройство подачи, механизм подачи нити (в основовязальной машине), смазочный питатель (в смазочных устройствах), подаватель (механизм)9) Сельское хозяйство: (высокопитательное) кормовое растение, высевающий аппарат, приёмный транспортёр, фидер (животное, откармливаемое на убой)10) Химия: воронка, разводящий литник, прибыль (слитка)11) Строительство: питающий канал, фидер (кабель), питатель (конвейер), фидерный отвод12) Железнодорожный термин: ветка железной дороги, вспомогательная линия, питательная решётка13) Экономика: железнодорожная ветка, фермер, занимающийся откормом скота14) Автомобильный термин: подающий транспортёр (в комбайне)15) Горное дело: механизм подачи, трещина, дающая воду, суфляр (газа)16) Лесоводство: заведующий гужевым транспортом лесозаготовительного участка17) Металлургия: прибыль18) Полиграфия: накладчик, пневматические присосы самонаклада, самонаклад, накладчик (напр. на печатной машине), питатель, подающий механизм19) Текстиль: петлеобразующая система (вязальной машины), питающая решётка, ящичный питатель20) Электроника: антенная линия передачи21) Вычислительная техника: линия передачи (от коммутационного узла), питающий механизм22) Нефть: сборный трубопровод (подсоединенный к магистральному), питательный провод23) Иммунология: кормящий организм, питающий подслой, фидер (в культуре клеток)24) Картография: подающая часть (в машинах)25) Биотехнология: фидер, слой поддерживающих клеток (необходимых для выживания и функционирования в культуре некоторых типов клеток. Фидер осуществляет метаболические, сигнальные и иммунопротекторные функции)26) Пищевая промышленность: фидеры27) Машиностроение: всасывающий патрубок, всасывающий рукав, кабель, провод28) Трикотаж: нитеводитель29) Экология: кормораздатчик, питающий организм30) Энергетика: присоединение31) Реклама: фирма общепита32) Бытовая техника: подающее устройство33) Бурение: питающий провод34) Нефтегазовая техника загрузочное устройство для сыпучих материалов, сборный трубопровод (подсоединённый к магистральному)35) Сетевые технологии: линия передачи от коммутационного узла37) Океанография: питающийся организм38) Химическое оружие: электрический ввод39) Макаров: высокопитательное кормовое растение, животное, откармливаемое на убой, источник, кормовое растение, облучатель антенны, фидерная линия, питающий подслой (в культуре клеток), бутылочка (для детского питания), фидер (фидерная линия)40) Золотодобыча: питающий или подводящий канал41) Электротехника: вводная ячейка (?)42) Общая лексика: ключ -
10 readiness time
- продолжительность состояния готовности
- время приведения системы в состояние эксплуатационной готовности
- время готовности модуля (блока) СВЧ
- время готовности газоразрядного прибора
- время готовности
время готовности
Интервал времени от момента подачи питания на гироскопическое устройство до момента, когда его точностные характеристики достигают требуемого уровня.
[Сборник рекомендуемых терминов. Выпуск 118. Г ироскопия. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
Обобщающие термины
EN
время готовности газоразрядного прибора
Интервал времени от момента подачи на газоразрядный прибор напряжения питания до момента, когда параметр, принятый за критерий готовности, достигнет заданного значения.
[ ГОСТ 20724-83]Тематики
EN
время готовности модуля (блока) СВЧ
время готовности
tгот
Интервал времени с момента приложения к модулю (блоку) СВЧ первого напряжения питания до момента, когда параметры, принятые в качестве критериев времени готовности, достигают заданных значений.
[ ГОСТ 23221-78]Тематики
Обобщающие термины
- модули СВЧ, блоки СВЧ
Синонимы
EN
время приведения системы в состояние эксплуатационной готовности
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
продолжительность состояния готовности
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
19. Время готовности газоразрядного прибора
Readiness time
Интервал времени от момента подачи на газоразрядный прибор напряжения питания до момента, когда параметр, принятый за критерий готовности, достигнет заданного значения
Источник: ГОСТ 20724-83: Приборы газоразрядные. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > readiness time
-
11 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
12 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
13 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
14 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
15 cos j
7.5. Защита от короткого замыкания и прочность при коротком замыкании
Примечание. В настоящее время требования этого пункта применимы главным образом к устройствам переменного тока. Требования к устройствам постоянного тока находятся в стадии рассмотрения.
7.5.1. Общие положения
НКУ должны иметь конструкцию, способную выдерживать тепловые и электродинамические нагрузки, возникающие при значениях токов короткого замыкания, не превышающих установленных.
Примечание. Нагрузки, возникающие вследствие короткого замыкания, могут быть уменьшены при помощи токоограничивающих устройств (индуктивностей, токоограничивающих плавких предохранителей или других токоограничивающих коммутационных устройств).
НКУ должны быть защищены от токов короткого замыкания, например, автоматическими выключателями, плавкими предохранителями или тем и другим вместе, которые могут быть частью НКУ или располагаться за его пределами.
Примечание. Если НКУ предназначены для использования в системах IT*, то аппарат защиты в каждой фазе должен иметь достаточную отключающую способность относительно междуфазного напряжения при двухфазном замыкании на землю.
* См title="Электроустановки зданий. Часть 3. Основные характеристики".
Потребитель, заказывая НКУ, должен определить условия короткого замыкания на месте его установки.
Примечание. Желательно, чтобы в случае повреждения, ведущего к образованию дуги внутри НКУ, обеспечивалась максимально возможная степень защиты персонала, хотя главной целью является предупреждение образования такой дуги принятием соответствующих мер при проектировании или ограничение длительности горения дуги.
Для ЧИ НКУ рекомендуется использовать устройства, прошедшие типовые испытания, например, системы сборных шин, если на них не распространяются исключения пп. 8.2.3.1.1 - 8.2.3.1.3. В случаях, когда применение устройств, прошедших типовые испытания, не представляется возможным, прочность этих частей при коротком замыкании проверяют путем экстраполяции, исходя из устройств, испытанных в соответствии с типовыми испытаниями.
7.5.2. Сведения, касающиеся прочности при коротком замыкании
7.5.2.1. Для НКУ, в котором имеется только один блок ввода, изготовитель обязан представлять сведения о прочности при коротком замыкании следующим образом:
7.5.2.1.1. Для НКУ с устройством защиты от короткого замыкания, включенным в блок ввода, указанием максимально допустимого значения ожидаемого тока короткого замыкания на зажимах блока ввода. Эта величина не должна превышать номинальные значения (см. пп. 4.3 - 4.7). Коэффициент мощности и пиковые значения должны соответствовать указанным в п. 7.5.3.
Если устройством защиты от короткого замыкания является плавкий предохранитель, то изготовитель обязан указать характеристики плавкой вставки (номинальный ток, отключающую способность, ток отключения, I2t и т.д.).
Если используют автоматический выключатель с расцепителем, имеющим выдержку времени, то может потребоваться указание максимальной выдержки времени и значения тока уставки, соответствующих ожидаемому току короткого замыкания.
7.5.2.1.2. Для НКУ, в которых защитное устройство от короткого замыкания не входит в блок ввода, прочность при коротком замыкании указывают с помощью следующих способов (одного или нескольких):
а) номинальный кратковременно выдерживаемый ток (п. 4.3) и номинальный ударный ток (п. 4.4) вместе с соответствующим временем, если оно отличается от 1 с. Отношение пикового значения к действующему должно соответствовать указанному в табл. 5.
Примечание. Для периодов времени с максимальным значением до 3 с соотношение между кратковременно выдерживаемым током и соответствующим временем представляется формулой
i2t = const
при условии, что пиковое значение не превышает значение номинального ударного тока;
b) номинальный ожидаемый ток короткого замыкания на зажимах блока ввода НКУ, а также соответствующее время, если оно отличается от 1 с. Соотношение между пиковым и действующим значением должно быть таким, как указано в табл. 5;
с) номинальный условный ток короткого замыкания (п. 4.6);
d) номинальный ток короткого замыкания, отключаемый плавким предохранителем (п. 4.7).
Для подпунктов с) и d) изготовитель обязан указывать характеристики (номинальный ток, отключающая способность, ток отключения, I2t и т.д.) токоограничивающих коммутационных устройств (например, автоматических выключателей или плавких предохранителей), необходимых для защиты НКУ.
Примечание. При замене плавких вставок должны использоваться вставки с такими же характеристиками.
7.5.2.2. Для НКУ с несколькими блоками ввода, одновременная работа которых маловероятна, прочность при коротком замыкании может указываться для каждого из блоков в соответствии с п. 7.5.2.1.
7.5.2.3. Для НКУ с несколькими блоками ввода, которые могут работать одновременно, а также для НКУ с одним блоком ввода и одним или несколькими блоками вывода для вращающихся машин большой мощности, могущих повлиять на величину тока короткого замыкания, должно быть заключено специальное соглашение о величинах ожидаемого тока короткого замыкания в каждом блоке ввода или вывода и на шинах.
7.5.3. Зависимость между пиковыми и действующим и значениями тока короткого замыкания
Пиковое значение тока короткого замыкания (пиковое значение первой волны тока короткого замыкания, включая постоянную составляющую) для определения электродинамических усилий, получается умножением действующего значения тока короткого замыкания на коэффициент п. Стандартные значения коэффициента n и соответствующего коэффициента мощности даны в табл. 5.
Таблица 5
Действующее значение тока короткого замыкания
cos j
n
I £ 5 кА
0,7
1,5
5 кА < I £ 10 кА
0,5
1,7
10 кА < I £ 20 кА
0,3
2
20 кА < I £ 50 кА
0,25
2,1
50 кА < I
0,2
2,2
Примечание. Значения, приведенные в табл. 5, соответствуют большинству случаев применения. В специальных местах, например, вблизи трансформаторов или генераторов, коэффициент мощности может иметь более низкие значения; таким образом, максимальное пиковое значение ожидаемого тока станет предельным значением вместо действующего значения тока короткого замыкания.
7.5.4. Координация устройств защиты от короткого замыкания
7.5.4.1. Координация устройств защиты должна являться предметом согласования между потребителем и изготовителем. Вместо такого соглашения можно использовать сведения, приводимые в каталоге предприятия-изготовителя.
7.5.4.2. Если по условиям эксплуатации необходима непрерывность питания, то уставки или выбор устройств защиты от короткого замыкания внутри НКУ должны производиться таким образом, чтобы короткое замыкание, возникающее в любой отходящей цепи ответвления, могло быть устранено с помощью отключающего устройства, установленного в поврежденной цепи ответвления без какого-либо воздействия на другие отходящие ответвления, чем гарантируется селективность системы защиты.
7.5.5. Внутренние цепи НКУ
7.5.5.1. Главные цепи
7.5.5.1.1. Шины (оголенные или с изоляцией) должны располагаться таким образом, чтобы при нормальных условиях эксплуатации исключалась возможность внутреннего короткого замыкания. При отсутствии других указаний их выбирают согласно сведениям о прочности при коротком замыкании (п. 7.5.2) и должны выдерживать по крайней мере воздействия коротких замыканий, ограниченных устройствами защиты на стороне подачи питания на шины.
7.5.5.1.2. Проводники между главными шинами и стороной питания отдельного функционального блока, также как и комплектующие, входящие в этот блок, могут быть выбраны, исходя из уменьшенных воздействий короткого замыкания со стороны присоединения нагрузки к устройству защиты от короткого замыкания в этом блоке, при условии такого расположения этих проводников, при котором в нормальных рабочих условиях внутреннее короткое замыкание между фазами и/или между фазами и землей является маловероятным, например, если проводники имеют соответствующую изоляцию или оболочку. Это также относится к проводникам со стороны питания отдельных функциональных блоков внутри НКУ, не содержащих главных шин.
7.5.5.2. Вспомогательные цепи
Обычно вспомогательные цепи должны быть защищены от воздействия коротких замыканий. Однако защитное устройство, предохраняющее от короткого замыкания, не следует применять в случае, если его срабатывание может иметь опасные последствия. В этом случае проводники вспомогательных цепей должны располагаться таким образом, чтобы в нормальных условиях работы исключалась возможность возникновения короткого замыкания.
Источник: ГОСТ 28668-90 Э: Низковольтные комплектные устройства распределения и управления. Часть 1. Требования к устройствам, испытанным полностью или частично оригинал документа
Англо-русский словарь нормативно-технической терминологии > cos j
16 activation
- напольное устройство для подключения
- возбуждение, включение, запуск
- активизация процедуры
- активизация (в информационных технологиях)
- активация основного покрываемого металла (подслоя)
- активация (в электросвязи)
- активация (в металлургии)
- активация
активация
(образование радионуклидов под действием излучений)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
активация
Интенсификация физ.-хим. процессов выведением систем из стабильного состояния воздействием на параметры процесса, на физ. или хим. состояние материала. Средствами воздействия (активирования) могут быть термоактивация, механич. удар или трение (механоактивация, трибохимия), радиоакт. излучения, электромагаитное поле, дуговые и искровые разряды, УЗ и т. д., а также предварит, хим. обработка, иногда сочетаемая с физ. воздействиями (напр., механо-хим. модификация минералов - частичное или полное превращение одного минерала в другой при обработке реагентом в процессе измельчения). А., как правило, сопровождается изменением термодинамического состояния вещ-ва, в частности увеличением запаса энергии, к-рая выделяется при хим. взаимодействии. Запас энергии вещ-ва повышается в ходе или после его а. в результате фазовых и структурных изменений, образования возбужд. молекул или распада на радикалы, ион-радикалы, из которых могут образоваться молекулы и др. продукты, с повыш. реакц. способностью.
[ http://metaltrade.ru/abc/a.htm]Тематики
EN
активация
Процедура программирования встроенного ПЗУ сотовых телефонов и пейджеров перед выдачей их абоненту; обычно осуществляется с помощью компьютера или специального устройства, называемого программатором. См. voice ~.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
активация основного покрываемого металла (подслоя)
Ндп. декапирование
Обработка поверхности основного покрываемого металла (подслоя) в растворах химическим или электрохимическим способом для снятия окисного слоя непосредственно перед получением покрытия.
[ГОСТ 9.008-82]Недопустимые, нерекомендуемые
Тематики
- покрытия металл. и неметалл.
EN
DE
FR
активизация
Процесс приведения объекта в состояние готовности выполнять возложенные на него функции.
[ http://www.morepc.ru/dict/]
активизация
Приведение технических и программных средств в активное состояние, например, путем подачи питания (запуска) устройства или загрузки программы в основную память.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
EN
активизация процедуры
Приведение процедуры в состояние готовности к выполнению при ее вызове.
[ ГОСТ 28397-89]Тематики
EN
возбуждение, включение, запуск
—
[В.А.Семенов. Англо-русский словарь по релейной защите]Тематики
EN
напольное устройство для подключения
Специальное устройство, предназначенное для установки электрических аппаратов и электроустановочных изделий, применяемое в напольных, устанавливаемых под полом и заподлицо с полом системах.
[ ГОСТ Р МЭК 61084-1 2007]
напольное устройство для подключения
-
[IEV number 442-02-42]EN
floor service unit
specific apparatus mounting device used when installing a floor system
[IEV number 442-02-42]FR
bloc de distribution au plancher
dispositif de montage d'appareil spécifique utilisé pour les systèmes installés au plancher
[IEV number 442-02-42]
Рис. THORSMAN
Напольное устройство для подключения, установленное заподлицо с полом
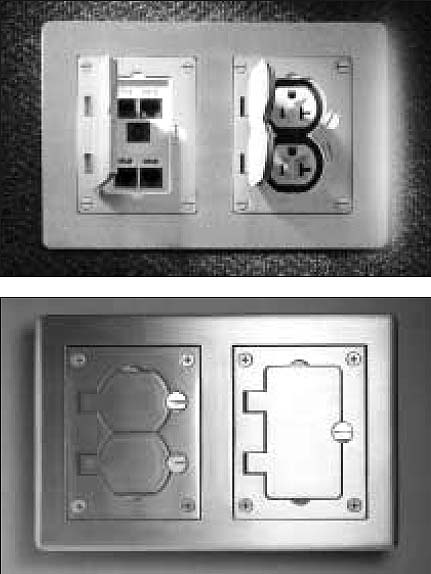
Рис. Wiremold/Legrand
Напольное устройство для подключения, установленное заподлицо с полом
Параллельные тексты EN-RU
An Activation for Every Application!
The Walkerduct Pro Series System offers a complete range of service fittings to meet all power, data and communication requirements.
The flush service fittings are available in brushed aluminum, brass and nonmetallic finishes for single-, double- and triple-duct runs.
Fittings are available for feeding directly out of the underfloor duct preset while keeping the connections to a minimum visibility.
[Wiremold/Legrand]Напольные устройства подключения для любых применений!
Система Walkerduct Pro Series System содержит полный комплект напольных устройств для подключения, допускающих встраивание любых электрических и телекоммуникационных розеток.
В состав серии входят алюминиевые (с матовой поверхностью), латунные и пластмассовые устанавливаемые заподлицо с полом устройства, соединяемые с одно-, двух- и трехканальными коробами.
Кабели попадают в напольные устройства непосредственно из расположенных под чистым полом специальных (глухих) коробов через закрепленные на них монтажные коробки. При этом напольные устройства остаются практически незаметными.
[Перевод Интент]
Тематики
- изделие электромонтажное
- электропроводка, электромонтаж
EN
DE
FR
Activation
Приведение процедуры в состояние готовности к выполнению при ее вызове
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
23. Активация
Иди. Декапирование I). Aktivicrung
E. Activation
F. Activation
Обработка поверхности основного металла или подслоя для снятия окисного слоя непосредственно перед нанесением покрытия
Источник: ГОСТ 9.008-73: ЕСЗКС. Покрытия металлические и неметаллические неорганические. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > activation
17 circuit
circuit nконтурaerodrome circuitкруг полета над аэродромомaerodrome taxi circuitсхема руления по аэродромуaerodrome traffic circuitаэродромный круг полетовaerodrome traffic circuit operationполет по кругу в районе аэродромаaeronautical fixed circuitцепь фиксированной авиационной связиalert circuitцепь оповещенияarmed circuitвключенная цепьbackup circuitрезервная цепьbroken circuitразорванная цепьbuilt-in test circuitцепь встроенного контроляcarry out a circuit of the aerodromeвыполнять круг полета над аэродромомcircuit alarmсигнал о неисправности цепиcircuit breakerавтомат защиты сетиcircuit flyingполеты по кругуcircuit patternсхема полета по кругуcircuit protection deviceустройство защитыcircuit rulesправила полета по кругуcircuit switched networkсеть коммутируемых цепейclosed circuitзамкнутая цепьclose the circuitзамыкать цепьcomplete the circuitзакольцовыватьconnect in circuitвключать цепьcontrol circuitцепь управленияcoupling circuitцепь связиdestruct circuitцепь взрываdirect speech circuitцепь прямой речевой связиelectrical circuitэлектроцепьenter the traffic circuitвходить в круг движенияerection circuitцепь коррекцииexciting circuitцепь поля возбужденияfailure detection circuitцепь обнаружения отказаfeedback circuitцепь обратной связиfeed circuitцепь питанияfield circuitцепь поля возбужденияfiring circuitцепь воспламененияfixed circuitустановленная схема полета по кругуground circuitцепь заземленияignition circuitцепь зажиганияinput circuitвходная цепьintergrated circuitинтегральная цепьinterlocking circuitцепь блокировкиleft circuitлевый круг полетаload circuitцепь нагрузкиlocking-out circuitцепь блокировкиloop circuitкольцевая цепьloop circuit systemкольцевая электрическая системаmain trunk circuitглавная магистральная цепь связиmonitoring circuitцепь контроляmultichannel circuitмногоканальная цепьmultichannel circuit systemмногоканальная электрическая системаopened circuitнезамкнутая цепьopen the circuitразмыкать цепьoutput circuitвыходная цепьparallel circuitпараллельная цепьpower supply circuitцепь подачи питанияprinted circuitпечатная схемаprotective circuitцепь защиты сетиprotect the circuitзащищать цепьradio link circuitцепь радиосвязиright circuitправый круг полетаsatellite circuitцепь спутниковой связиsearch circuitсхема поискаself-test circuitцепь самоконтроляseries circuitпоследовательная цепьshort circuitнапрямую замкнутая цепьstandby circuitрезервная цепьstarting circuitцепь запускаswitching circuitкоммутационная цепьtraffic circuitсхема полетов по кругуwarning circuitцепь сигнализации18 feeder
ˈfi:də сущ.
1) а) кормилец;
уст. шпион;
редк. пастух б) кормушка в) едок;
домочадец, приживальщик;
уст. тунеядец, паразит He was a very large feeder. ≈ Он был большой любитель поесть. large feeder gross feeder г) толстяк д) скот, откармливаемый на убой
2) а) приток( у реки) ;
подземный водоток Syn: tributary б) ж.-д. ветка в) вспомогательная транспортная( автобусная и т.п.) линия г) расш. любой источник снабжения чем-л.
3) а) тех. питатель, подающий механизм б) комп. автоподатчик( в сканере, ксероксе и т.п.) в) электр. фидер( линия радиопередачи;
распределительная линия электропередачи) г) муз. в органе - подающая камера с воздухом
4) а) то же, что feeding-bottle б) детский нагрудник Syn: bib в) сл. ложка (которой едят) (разговорное) едок - a large /gross/ * обжора - he is a quick * он ест очень быстро( техническое) питатель, подающий механизм;
загрузочное устройство (электротехника) фидер вспомогательная воздушная, автобусная и т. п. линия (тж. * line) - * airline местная авиалиния - * airliner пассажирский самолет местной авиалинии (гидрология) приток реки;
канал бутылочка (для детского питания) детский нагрудник (сельскохозяйственное) (высокопитательное) кормовое растение( сельскохозяйственное) животное, откармливаемое на убой кормушка;
кормораздатчик (американизм) воспитатель, тренер( американизм) (разговорное) источник пополнения, поставщик (геология) побочная жила( горное) суфляр (газа) (театроведение) (профессионализм) актер, подающий реплики ( герою) ;
актер на вторые роли feeder = feedingbottle ~ ж.-д. ветка ~ детский нагрудник ~ едок;
a large (или gross) feeder обжора;
he is a quick feeder он ест очень быстро ~ кормушка ~ вспомогательная (воздушная, автобусная и т. п.) линия ~ тех. питатель, подающий механизм ~ приток (реки) ;
канал ~ устройство подачи ~ эл. фидер ~ фидер feeder = feedingbottle feedingbottle: feedingbottle детский рожок ~ едок;
a large (или gross) feeder обжора;
he is a quick feeder он ест очень быстро ~ едок;
a large (или gross) feeder обжора;
he is a quick feeder он ест очень быстро19 IEEE 802.3af-2003
стандарт IEEE 802.3af-2003"Электропитание терминального оборудования данных (Data Terminal Equipment, DTE) через интерфейс среды передачи (Media Dependent Interface, MDI)"; другое его название - Power over Ethernet (PoE). Стандарт разработан с целью обеспечения работающих по сетям 10Base-T, 100Base-ТХ и 1000Base-Т устройств единым интерфейсом как для обмена данными, так и для электропитания. Электропитание напряжением 48 вольт подаётся по двум неэкранированным витым парам кабеля Ethernet в кабельную систему через питающее устройство (Power Sourcing Equipment, PSE), которое располагается на одном из концов канала передачи данных или в промежуточной точке. Устройство, получающее питание (Powered Device, PD), расположено на другом конце канала. Такая технологии подачи питания по Ethernet упрощает развёртывание систем IP-телефонии, беспроводных точек доступа и дрАнгло-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > IEEE 802.3af-2003
20 time delay
- задержка срабатывания
- задержка (в электронно-лучевой трубке)
- задержка
- выдержка времени
- время задержки
- временная задержка
время задержки
—
[Интент]Параллельные тексты EN-RU
The relay remains energized for the duration of the timer.
[Schneider Electric]Реле остается включенным до истечения времени задержки.
[Перевод Интент]
Тематики
- электротехника, основные понятия
EN
выдержка времени
(в реле времени)
[Интент]Параллельные тексты EN-RU
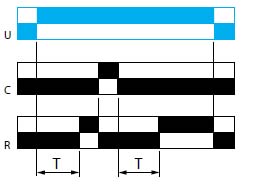
The timing period T starts on energization.
At the end of the timing period T, the output R closes.
Closing of the control contact C makes the output R open.
Opening of control contact C restarts timing period T.
At the end of the timing period T, the output R closes.
[Schneider Electric]Отсчет выдержки времени T начинается от момента подачи питания на реле времени.
По окончании выдержки T выход R замыкается.
При подаче напряжения на управляющий вход C выход R размыкается.
В момент снятия напряжения с управляющего входа C вновь начинается отсчет выдержки T.
По окончании отсчета выдержки времени T выход R замыкается.
[Перевод Интент]
Тематики
Сопутствующие термины
- начало отсчета выдержки времени
- окончание выдержки времени
- отсчет выдержки времени
- прерывание отсчета выдержки времени
EN
временная задержка
запаздывание
фиксированная задержка
заданная задержка
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]
задержка
-
[Интент]
задержка
запаздывание
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]Тематики
Синонимы
EN
задержка
запаздывание
Период времени, который требуется для вывода изображения на экран электронно-лучевой трубки, в течение которого его не видно. Это вызвано эффектом послесвечения люминофора.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
задержка срабатывания
-
[Интент]Параллельные тексты EN-RU
As implemented in the LTM R controller, all motor protection function trip time delays are definite time, except for the Thermal Overload function, which also offers inverse thermal trip time delays.
[Schneider Electric]Применительно к контроллеру LTM R, все задержки срабатывания защиты электродвигателя являются фиксированными, кроме функции защиты от перегрузки, определяемой по тепловому состоянию, которая может использовать и обратнозависимые задержки срабатывания.
[Перевод Интент]When the overfluxing value exceeds this threshold the P63x will determine the tripping time according to the overfluxing magnitude value and the set characteristic.
[Schneider Electric]Если значение перевозбуждения становится выше заданного предельного значения, то устройство P63x определяет задержку срабатывания в зависимости от значения перевозбуждения и заданной характеристики.
[Перевод Интент]
Тематики
- автоматизация, основные понятия
- выключатель автоматический
- релейная защита
EN
Англо-русский словарь нормативно-технической терминологии > time delay
СтраницыСм. также в других словарях:
устройство — 2.5 устройство: Элемент или блок элементов, который выполняет одну или более функцию. Источник: ГОСТ Р 52388 2005: Мототранспортны … Словарь-справочник терминов нормативно-технической документации
устройство питания прядильного блока — пневмомеханической прядильной машины, предназначенное для подачи волокнистого продукта к разъединяющему устройству. [ГОСТ 25719 83] Тематики машины прядильные … Справочник технического переводчика
Устройство трактора — Трактор классического типа Основная статья: Трактор Трактор состоит из следующих механизмов и систем: Несущая система (Остов); Двигатель и его … Википедия
Характеристика шнуров питания — 2.3 Характеристика шнуров питания 2.3.1 съемный шнур: Гибкий шнур, предназначенный для питания прибора или взаимосвязи, который присоединяют к прибору посредством соответствующего приборного соединительного устройства. 2.3.2 промежуточный шнур:… … Словарь-справочник терминов нормативно-технической документации
Система подачи топлива — Система подачи топлива в двигателях внутреннего сгорания служит для подачи топлива из топливного бака к топливной рейке (моноблок дроссельных заслонок), избыток топлива через регулятор давления возвращается в бак.[1] Содержание 1 Структура… … Википедия
Инжекторная система подачи топлива — Двигатель АШ 82 в музее в Праге Система впрыска топлива (англ. Fuel Injection System) система подачи топлива, устанавливаемая на современных бензи … Википедия
СТО 17330282.27.140.020-2008: Системы питания собственных нужд ГЭС. Условия создания. Нормы и требования — Терминология СТО 17330282.27.140.020 2008: Системы питания собственных нужд ГЭС. Условия создания. Нормы и требования: 3.1 ввод в эксплуатацию: Событие, фиксирующее готовность изделия к использованию по назначению и документально оформленное в… … Словарь-справочник терминов нормативно-технической документации
Электропроигрывающее устройство — (ЭПУ) законченный узел, представляющий собой совокупность механизмов и электрических цепей, необходимых для считывания информации с грампластинки. Будучи установленным в корпус с источником питания, ЭПУ превращается в электропроигрыватель.… … Википедия
вводное устройство — 3.54 вводное устройство: Обособленное устройство в электрооборудовании или единая конструктивная часть основной оболочки электрооборудования, содержащее(ая) соединительные контактные зажимы. Источник: ГОСТ Р МЭК 60079 0 2011: Взрывоопасные среды … Словарь-справочник терминов нормативно-технической документации
коммутационное устройство — 3.64 коммутационное устройство: Устройство, предназначенное для обеспечения или прерывания подачи электрического тока в электрические цепи (см. [5]). Примечание Коммутационное устройство может выполнять одну или обе эти функции. (См. 3.54 ЕН… … Словарь-справочник терминов нормативно-технической документации
линия питания — питатель, фидер, линия подачи, загрузочное устройство Словарь русских синонимов … Словарь синонимов
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на все языки
со всех языков на английский- Со всех языков на:
- Английский
- С английского на:
- Русский